Apelidada de NanoGripper, a mão nanorobótica também pode ser programada para interagir com outros vírus ou reconhecer marcadores de superfície celular.
Por Universidade de Illinois em Urbana-Champaign, News Bureau com informações de Science Daily.
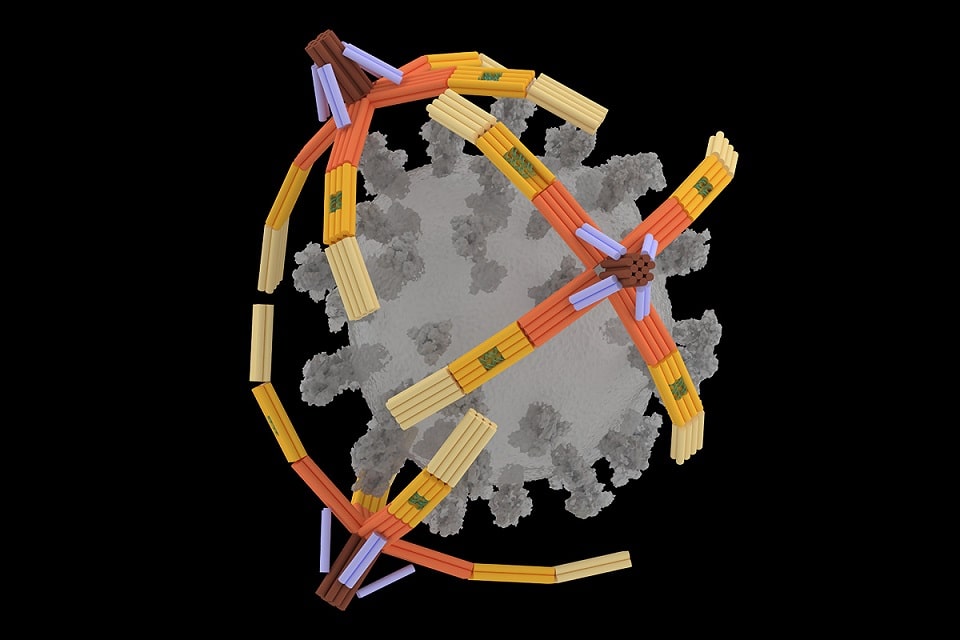
Uma pequena “mão” de quatro dedos dobrada a partir de um único pedaço de DNA pode pegar o vírus que causa a COVID-19 para detecção rápida altamente sensível e pode até mesmo bloquear partículas virais de entrarem nas células para infectá-las, relatam pesquisadores da University of Illinois Urbana-Champaign. Apelidada de NanoGripper, a mão nanorobótica também pode ser programada para interagir com outros vírus ou reconhecer marcadores de superfície celular para administração direcionada de medicamentos, como para tratamento de câncer.
Liderados por Xing Wang, professor de bioengenharia e química na Universidade de Illinois, os pesquisadores descrevem seu avanço na revista Science Robotics .
Inspirados pelo poder de preensão da mão humana e das garras dos pássaros, os pesquisadores projetaram o NanoGripper com quatro dedos dobráveis e uma palma, tudo em uma nanoestrutura dobrada a partir de um único pedaço de DNA. Cada dedo tem três articulações, como um dedo humano, e o ângulo e o grau de curvatura são determinados pelo design no andaime de DNA.
“Queríamos fazer um robô de material macio, em nanoescala, com funções de agarrar nunca vistas antes, para interagir com células, vírus e outras moléculas para aplicações biomédicas”, disse Wang. “Estamos usando DNA por suas propriedades estruturais. Ele é forte, flexível e programável. No entanto, mesmo no campo do origami de DNA, isso é novo em termos do princípio do design. Dobramos uma longa fita de DNA para frente e para trás para fazer todos os elementos, tanto as peças estáticas quanto as móveis, em uma etapa.”
Os dedos contêm regiões chamadas aptâmeros de DNA que são especialmente programados para se ligar a alvos moleculares — a proteína spike do vírus que causa a COVID-19, para esta primeira aplicação — e acionar os dedos para dobrar para envolver o alvo. No lado oposto, onde o pulso estaria, o NanoGripper pode se prender a uma superfície ou outro complexo maior para aplicações biomédicas, como detecção ou administração de medicamentos.

Para criar um sensor para detectar o vírus da COVID-19, a equipe de Wang fez uma parceria com um grupo liderado pelo professor de engenharia elétrica e de computação de Illinois, Brian Cunningham, especialista em biossensores. Eles acoplaram o NanoGripper a uma plataforma de sensor de cristal fotônico para criar um teste rápido de COVID-19 de 30 minutos que corresponde à sensibilidade dos testes moleculares qPCR padrão ouro usados por hospitais, que são mais precisos do que os testes em casa, mas demoram muito mais.
“Nosso teste é muito rápido e simples, pois detectamos o vírus intacto diretamente”, disse Cunningham. “Quando o vírus é segurado na mão do NanoGripper, uma molécula fluorescente é acionada para liberar luz quando iluminada por um LED ou laser. Quando um grande número de moléculas fluorescentes é concentrado em um único vírus, ele se torna brilhante o suficiente em nosso sistema de detecção para contar cada vírus individualmente.”
Além de diagnósticos, o NanoGripper pode ter aplicações na medicina preventiva, bloqueando vírus de entrar e infectar células, disse Wang. Os pesquisadores descobriram que quando os NanoGrippers foram adicionados a culturas de células que foram então expostas à COVID-19, múltiplas pinças envolveriam a parte externa dos vírus. Isso bloqueou as proteínas spike virais de interagir com receptores na superfície das células, prevenindo a infecção.
“Seria muito difícil aplicá-lo depois que uma pessoa é infectada, mas há uma maneira de usá-lo como uma terapêutica preventiva”, disse Wang. “Poderíamos fazer um composto antiviral de spray nasal. O nariz é o ponto quente para vírus respiratórios, como COVID ou influenza. Um spray nasal com o NanoGripper poderia evitar que vírus inalados interagissem com as células do nariz.”

O NanoGripper poderia ser facilmente projetado para atingir outros vírus, como influenza, HIV ou hepatite B, disse Wang. Além disso, Wang prevê usar o NaoGripper para entrega direcionada de medicamentos. Por exemplo, os dedos poderiam ser programados para identificar marcadores específicos de câncer, e as pinças poderiam levar tratamentos de combate ao câncer diretamente para as células-alvo.
“Essa abordagem tem um potencial maior do que os poucos exemplos que demonstramos neste trabalho”, disse Wang. “Existem alguns ajustes que teríamos que fazer com a estrutura 3D, a estabilidade e os aptâmeros de direcionamento ou nanocorpos, mas desenvolvemos várias técnicas para fazer isso no laboratório. Claro que exigiria muitos testes, mas as aplicações potenciais para tratamento de câncer e a sensibilidade alcançada para aplicações de diagnóstico demonstram o poder dos nanorrobóticos suaves.”
O National Institutes of Health e a National Science Foundation apoiaram este trabalho. Wang e Cunningham são afiliados ao Carl R. Woese Institute for Genomic Biology e ao Holonyak Micro and Nanotechnology Lab na U. of I.
Nota do editor: para entrar em contato com Xing Wang, envie um e-mail para @illinois.edu” title=”mailto:xingw@illinois.edu”>xingw@illinois.edu.
O artigo “Bioinspired designer DNA NanoGripper for virus sensing and potential inhibition” está disponível em @aaas.org” title=”mailto:robopak@aaas.org”>robopak@aaas.org. DOI: 10.1126/scirobotic
Este trabalho foi apoiado em parte pelas bolsas do NIH R21EB031310, R44DE030852 e R21AI166898.
Fonte da história:
Materiais fornecidos pela University of Illinois at Urbana-Champaign, News Bureau . Original escrito por Liz Ahlberg Touchstone. Nota: O conteúdo pode ser editado quanto ao estilo e ao comprimento.
Referência do periódico :
Lifeng Zhou, Yanyu Xiong, Abhisek Dwivedy, Mengxi Zheng, Laura Cooper, Skye Shepherd, Tingjie Song, Wei Hong, Linh T. P. Le, Xin Chen, Saurabh Umrao, Lijun Rong, Tong Wang, Brian T. Cunningham, Xing Wang. Bioinspired designer DNA NanoGripper for virus sensing and potential inhibition. Science Robotics, 2024; 9 (96) DOI: 10.1126/scirobotics.adi2084
VEJA TAMBÉM:
![Estrela expulsa de buraco negro passou próxima a Terra em velocidade altíssima]()
Estrela expulsa de buraco negro passou próxima a Terra em velocidade altíssima
![Índia não cumprirá meta de energia renovável, dizem autoridades]()
Índia não cumprirá meta de energia renovável, dizem autoridades
![Cientistas acabaram de ressuscitar o vírus da “Gripe Espanhola” de 1918 – aqui está o que eles desco...]()
Cientistas acabaram de ressuscitar o vírus da “Gripe Espanhola” de 1918 – aqui está o que eles desco...
![Fundo da Amazônia em risco de extinção devido a políticas do governo Bolsonaro]()
Fundo da Amazônia em risco de extinção devido a políticas do governo Bolsonaro
![Egito anuncia descoberta de mais de 100 sarcófagos com cerca de 2,5 mil anos]()
Egito anuncia descoberta de mais de 100 sarcófagos com cerca de 2,5 mil anos
![Macacos fazem festa na piscina enquanto humanos ficam de quarentena]()
Macacos fazem festa na piscina enquanto humanos ficam de quarentena
![Enterro de Kelvin terminou com PM dando tiros de fuzil]()
Enterro de Kelvin terminou com PM dando tiros de fuzil
![Deputados do PSL invadem colégio público no Rio para fazer “vistoria” política e são vaiados]()
Deputados do PSL invadem colégio público no Rio para fazer “vistoria” política e são vaiados
![Representação completa do zodíaco encontrada em antigo templo egípcio]()
Representação completa do zodíaco encontrada em antigo templo egípcio
![Menina de 13 anos dá soco em tubarão na Flórida para escapar de ataque]()
Menina de 13 anos dá soco em tubarão na Flórida para escapar de ataque